Прості методи детектування ЧС (FM) сигналу. Конспект
Мета роботи
Вивчення принципу дії демодуляторів. Робота демодулятора за умов перешкод. Вивчення впливу порога на можливість помилки при АМ.
Коротка характеристика досліджуваних ланцюгів та сигналів
У роботі використовується універсальний стенд зі змінним блоком "МОДУЛЯТОР-ДЕМОДУЛЯТОР", функціональна схема якого наведена на рис. 20.1.
Джерелом цифрового сигналу є КОДЕР-1, який видає періодичну послідовність п'яти символів. За допомогою тумблерів можна встановити будь-яку п'ятиелементну кодову комбінацію, що індикується лінійкою з п'яти світлодіодних індикаторів із написом «ПЕРЕДАНО».
У блоці МОДУЛЯТОР відбувається модуляція (маніпуляція) двійковими символами «високочастотних» коливань за амплітудою, частотою або фазою, залежно від положення перемикача «ВИД МОДУЛЯЦІЇ» – АМ, ЧС, ФМ або ОФМ. При нульовому положенні перемикача вихід модулятора з'єднаний з його входом (модуляція відсутня).
КАНАЛ зв'язку є суматором сигналу з виходу модулятора і шуму, генератор якого (ГШ) розташований в блоці ДЖЕРЕЛА СИГНАЛІВ. Внутрішній генератор квазібілого шуму, що імітує шум каналу зв'язку, працює в тій же смузі частот, де розташовані спектри модульованих сигналів (12–28 кГц).ДЕМОДУЛЯТОР виконаний за когерентною схемою із двома гілками; комутація видів модуляції – загальна із модулятором. Відповідно до цього еталонні сигнали s 0 та s 1 і граничні напруги в контрольних точках стенду змінюються автоматично при зміні виду модуляції.
Знаками ( × ) на функціональній схемі позначені аналогові перемножувачі сигналів, виконані на спеціалізованих ІМС. Блоки інтеграторів виконані операційними підсилювачами. Електронні ключі (на схемі не показано) розряджають конденсатори інтеграторів перед початком кожного символу.
Суматори (å) призначені для введення порогових значень напруги, що залежать від енергії еталонних сигналів s 1 та s 0 .
Блок «РУ» - вирішальний пристрій - є компаратором, тобто пристрій, що порівнює напруги на виходах суматорів. Саме «рішення», тобто. сигнал "0" або "1", подається на вихід демодулятора в момент перед закінченням кожного символу і зберігається до прийняття наступного "рішення". Моменти прийняття «рішення» та подальшого розряду конденсаторів в інтеграторах задаються спеціальною логічною схемою, що управляє електронними комутаторами.
Для демодуляції сигналів з ОФМ до схеми демодулятора ФМ додаються блоки (на схемі не показані), які порівнюють попереднє і подальше рішення демодулятора ФМ, що дозволяє зробити висновок про скачування фази (або його відсутності) в символі. За наявності такого стрибка на вихід демодулятора подається сигнал «1», інакше – «0». У змінному блоці передбачений тумблер, що перемикає початкову фазу (j) опорного коливання (0 або p) – тільки ФМ та ОФМ. Для нормальної роботи демодулятора перемикач повинен бути в нульовому положенні.
При амплітудній маніпуляції передбачена можливість ручної установки порога з метою вивчення його впливу на ймовірність помилки прийому символу. Оцінка ймовірності помилки провадиться в ПК шляхом підрахунку числа помилок за певний час аналізу. Самі сигнали помилки (у символі або «літері») формуються у спеціальному блоці стенду («КОНТРОЛЬ ПОМИЛОК»), розташованому нижче за блок ЦАП. Для візуального контролю помилок у стенді є світлодіодні індикатори.
Як вимірювальні прилади використовуються двоканальний осцилограф, вбудований вольтметр і ПК, що працює в режимі підрахунку помилок.
Домашнє завдання
Вивчіть основні розділи теми за конспектом лекцій та літератури: .
Лабораторне завдання
1. Спостерігайте осцилограми сигналів у різних точках схеми демодулятора за відсутності шуму в каналі.
2. Спостерігайте появу помилок у роботі демодулятора за наявності шуму в каналі. Оцініть ймовірність помилки для АМ та ЧС при фіксованому значенні відношення сигнал/шум.
3. Отримайте залежність від ймовірності помилок при АМ від порогової напруги.
Методичні вказівки
1. Робота демодулятора за умов відсутності перешкод.
1.1. Зібрати схему вимірів згідно з рис. 20.2. Тумблер КОДЕРА-1 набрати будь-яку двійкову комбінацію з 5 елементів. Ручку регулятора "ПОРІГ АМ" встановити в крайнє ліве положення. При цьому регулятор вимкнено та поріг встановлюється автоматично при зміні виду модуляції. Тумблер фазування опорного коливання ДЕМОДУЛЯТОРА встановити у положення "0". З'єднати вихід генератора шуму (ГШ) у блоці ДЖЕРЕЛА СИГНАЛІВ з входом n(t) КАНАЛУ зв'язку. Потенціометр виходу генератора шуму – у крайньому лівому положенні (напруга шуму відсутня). Вхід зовнішньої синхронізації осцилографа з'єднати з гніздом C2 в блоці ДЖЕРЕЛА, а підсилювачі вертикального відхилення променів перевести в режим з відкритим входом (для пропускання постійних складових досліджуваних процесів).

1.2. Кнопкою перемикання видів модуляції встановити варіант "0", що відповідає сигналу на вході модулятора. Зняти осцилограму цього сигналу і, не змінюючи режим розгортки осцилографа, вибрати один із видів модуляції (АМ). Замалювати осцилограми в контрольних точках демодулятора:
· На вході демодулятора;
· На виходах перемножувачів (в одному масштабі по вертикальній осі);
· На виходах інтеграторів (також в одному масштабі);
· На виході демодулятора.
На всіх отриманих осцилограм відзначити положення осі часу (тобто положення нульового рівня сигналу). Для цього можна зафіксувати положення лінії розгортки при замиканні вхідних затискачів осцилографа.
1.3. Повторити п.1.2 іншого виду маніпуляції (ЧМ).
2. Робота демодулятора за умов перешкод.
2.1. Перемикачем ВИГЛЯД МОДУЛЯЦІЇ встановити ФМ. Підключити один із входів двопроменевого осцилографа до входу модулятора, а другий – до виходу демодулятора. Отримайте нерухомі осцилограми цих сигналів.
2.2. Плавно збільшуючи рівень шуму (потенціометром ГШ) домогтися появи рідкісних збоїв на вихідний осцилограмі або на вихідному табло ПРИЙНЯТО.
2.3. За допомогою осцилографа виміряти встановлене відношення сигнал/шум. Для цього, послідовно відключаючи джерело шуму, виміряти на вході демодулятора розмах сигналу (у поділах на екрані) а– (тобто подвійна амплітуда сигналу), а відключаючи джерело сигналу від входу каналу та відновивши шумовий сигнал, виміряти розмах шуму (також у поділах) – 6s. Знайдене ставлення а/s внести до табл. 20.1.
2.4. Перемикачем «Вид модуляції» встановлювати послідовно АМ, ЧС, та ФМ, спостерігаючи за спалахами світлодіода «ПОМИЛКА» або по осцилограмі вихідного сигналу демодулятора частоту появи помилок. Результати спостережень унести до звіту.
2.5. Не змінюючи рівень шуму в каналі, виміряти ймовірність помилки демодулятора прийому символу за кінцевий час аналізу (тобто оцінку ймовірності помилки). Для цього привести ПК у режим вимірювання ймовірності помилки (див. ДОДАТОК) та встановити час аналізу 10-30 с. Починаючи з ФМ (а потім – ЧС та АМ), визначити число помилок за час аналізу та оцінку ймовірності помилки. Отримані дані внести до табл. 20.1.
Таблиця 20.1
Оцінка ймовірності помилки при а/s = const
| |
3.1. Перемикачем ВИГЛЯД МОДУЛЯЦІЇ встановити АМ. Потенціометр виходу генератора шуму встановити щонайменше. За допомогою осцилографа, підключеного до виходу нижнього інтегратора, виміряти розмах пилкоподібної напруги по вертикалі у вольтах – U max.
3.2. Заготовити табл. 20.2 передбачити в ній не менше 5 значень порога Uпір.
Таблиця 20.2
Оцінка ймовірності помилки залежно від порога (АМ)
3.3. Потенціометром «ПОРІГ АМ» встановити значення порога U max /2 (вимірюючи напругу « Е 1/2» у контрольній точці демодулятора за допомогою вольтметра постійної напруги). Збільшити рівень шуму каналі до появи рідкісних збоїв. Не змінюючи рівень шуму, виміряти оцінку ймовірності помилки цього порога ( U max /2), а потім і для всіх інших значень Uпір. Побудувати графік залежності Рош = j ( Uпір).
Звіт
Звіт повинен містити:
1) функціональну схему вимірів;
2) осцилограми, таблиці та графіки за всіма пунктами вимірювань;
3) висновки з пп. 2.4 та 3.3.
Контрольні питання
1. Яке призначення демодулятора у цифровій системі зв'язку? У чому його основна відмінність від демодулятора аналогової системи?
2. Що таке скалярне добуток сигналів? Як воно використовується у алгоритмі роботи демодулятора?
3. Чи можна в оптимальному демодуляторі застосовувати узгоджені фільтри?
4. Що таке "критерій ідеального спостерігача"?
5. Що таке «правило максимуму правдоподібності»?
6. Як вибирається поріг вирішального пристрою? Що буде, якщо його змінити?
7. Який алгоритм прийняття рішення до РУ?
8. Поясніть призначення кожного блоку демодулятора.
10. Наведіть алгоритм оптимального демодулятора та його функціональну схему для АМ.
11. Наведіть алгоритм оптимального демодулятора та його функціональну схему для ЧС.
12. Поясніть різницю у перешкодостійкості систем зв'язку з різними видами модуляції.
13. Поясніть осцилограми, отримані у різних контрольних точках демодулятора (для одного з видів модуляції).
Лабораторна робота 21
Дослідження оптимальних когерентних
МЕТА РОБОТИ
Вивчення принципу дії демодуляторів. Робота демодулятора за умов перешкод. Вивчення впливу порога на можливість помилки при АМ.
1.КОДУВАННЯ І МОДУЛЯЦІЯ
У сучасних системах передачі дискретних повідомлень прийнято розрізняти дві групи щодо самостійних пристроїв: кодеки та модеми. Кодекомназиваються пристрої, що перетворюють повідомлення на код (кодер) і код на повідомлення (декодер), а модемом- пристрої, що перетворюють код на сигнал (модулятор) і сигнал на код (демодулятор).
При надсиланні безперервного повідомлення а(t)воно спочатку перетворюється на первинний електричний сигнал b(t),а потім, як; правило, за допомогою модулятора формується сигнал s(t),який і надсилається до лінії зв'язку. Прийняте вагання x(t)піддається зворотним перетворенням, у яких виділяється первинний сигнал b(t).По ньому потім відновлюється з тією чи іншою точністю повідомлення а(t).
Загальні засади модуляції передбачаються відомими. Зупинимося коротко на особливостях дискретної модуляції.
При дискретній модуляції закодоване повідомлення а, Що являє собою послідовність кодових символів-( b i ), перетворюється на послідовність елементів (посилок) сигналу ( s i). В окремому випадку дискретна модуляція зводиться до впливу кодових символів на переносник f(t).
За допомогою модуляції один із параметрів переносника змінюється за законом, що визначається кодом. При безпосередньої передачі переносником може бути постійний струм, параметрами якого є величина і напрямок струму. Зазвичай як переносник, як і в безперервній модуляції, використовується змінний струм (гармонійне коливання). В цьому випадку можна отримати амплітудну (АМ), частотну (ЧМ) та фазову (ФМ) модуляції. Дискретну модуляцію часто називають маніпуляцієюа пристрій, що здійснює дискретну модуляцію (дискретний модулятор), називають маніпулятором або генератором сигналів.
Рис.1. наведено форми сигналів при двійковому коді для різних видів маніпуляції. При АМ символу 1 відповідає передача коливання, що несе, протягом часу Т (посилання), символу 0 - відсутність коливання (пауза). При ЧС передача несучого коливання з частотою f 1відповідає символу 1, а передача коливання із частотою f Провідповідає 0. При двійковій ФМ змінюється фаза несучої на 180 0 при кожному переході від 1 до 0 та від 0 до
На практиці знайшла застосування система відносної фазової модуляції (ОФМ). На відміну від ФМ, при ОФМ фаза сигналів відраховується немає деякого зразка, як від фази попереднього елемента сигналу. У двійковому випадку символ 0 передається відрізком синусоїди з початковою фазою попереднього елемента сигналу, а символ 1 - таким самим відрізком з початковою фазою, що відрізняється від початкової фази попереднього елемента сигналу на . При ОФМ передача починається з посилки одного елемента, що не несе інформації, який служить опорним сигналом для порівняння фази наступного елемента.
2. ДЕМОДУЛЯЦІЯ І ДЕКОДУВАННЯ
Відновлення переданого повідомлення у приймачі зазвичай здійснюється у такій послідовності. Спочатку проводиться демодуляціясигналу. У системах передачі безперервних повідомлень у результаті демодуляції відновлюється первинний сигнал, що відображає передане повідомлення.
У системах передачі дискретних повідомлень у результаті демодуляціїпослідовність елементів сигналу перетворюється на послідовність кодових символів, після чого ця послідовність перетворюється на послідовність елементів повідомлення. Це перетворення називається декодування.
Та частина приймального пристрою, яка здійснює аналіз сигналу, що надходить і приймає рішення про передане повідомлення, називається вирішальною схемою.
У системах передачі дискретних повідомлень вирішальна схема складається з двох частин: першої – демодулятораі другий - декодера.
На вхід демодулятора з виходу каналу зв'язку надходить сигнал спотворений адитивними та мультиплікативними перешкодами. На виході демодулятора формується дискретний сигнал, тобто послідовність кодових символів. Зазвичай деякий відрізок (елемент) безперервного сигналу перетворюється модемом на один кодовий символ (поелементний прийом). Якби цей кодовий символ завжди збігався з переданим (надійшли на вхід модулятора), то зв'язок був би безпомилковим. Але як відомо, перешкоди призводять до неможливості з абсолютною достовірністю відновити по прийнятому сигналу переданий кодовий символ.
Кожен демодулятор математично описується законом, яким поступив з його вхід безперервний сигнал перетворюється на кодовий символ. Цей закон називається правилом рішення, або вирішальною схемою. Демодулятори з різними правилами рішення видаватимуть, взагалі кажучи, різні рішення, з яких одні будуть вірними, інші помилковими.
Вважатимемо, що властивості джерела повідомлення та кодера відомі. Крім того, відомий модулятор, тобто задане, яка реалізація елемента сигналу відповідає тому чи іншому кодовому символу, а також задана математична модель безперервного каналу. Потрібно визначити, який має бути демодулятор (правило рішення), щоб забезпечити оптимальну (тобто найкращу з можливих) якість прийому.
Таке завдання було вперше поставлено та вирішено (для гаусівського каналу) у 1946 р. видатним радянським ученим В. А. Котельниковим. У цьому постановці якість оцінювалося вірогідністю правильного прийому символу. Максимум цієї ймовірності
при заданому вигляді модуляції В.А.Котельников назвав , а демодулятор, який забезпечує цей максимум, - ідеальним приймачем.З цього визначення випливає, що в жодному реальному демодуляторі ймовірність правильного прийому символу не може бути більшою, ніж в ідеальному приймачі.
На погляд принцип оцінки якості прийому ймовірністю правильного прийому символу здається цілком природним і навіть єдино можливим. Нижче буде показано, що це не завжди так і що існують інші критерії якості, застосовні в тих чи інших окремих випадках.
3. ПРИЙОМ СИГНАЛІВ ЯК СТАТИСТИЧНЕ ЗАДАЧА
Зазвичай спосіб передачі (спосіб кодування та модуляції) заданий і потрібно визначити завадостійкість, яку o6ecпечують різні способи прийому. Який із можливих способів прийому є оптимальним? Зазначені питання є предметом розгляду теорії завадостійкості, основи якої розроблені академіком В. А. Котельниковим.
Перешкодостійкістю системи зв'язку називається здатність системи розрізняти (відновлювати) сигнали із заданою достовірністю.
Завдання визначення завадостійкості всієї системи загалом дуже складне. Тому часто визначають завадостійкість окремих ланок системи: приймача при заданому способі передачі, системи кодування або системи модуляції при заданому способі прийому і т.д.
Гранично досяжна завадостійкість називається, за Котельниковим, потенційною завадостійкістю. Порівняння потенційної та реальної перешкодостійкості пристрою дозволяє дати оцінку якості реального пристрою та знайти ще невикористані резерви. Знаючи, наприклад, потенційну завадостійкість приймача, можна судити, наскільки близька до неї реальна завадостійкість існуючих способів прийому і наскільки доцільно їхнє подальше вдосконалення при заданому способі передачі.
Відомості про потенційну завадостійкість приймача при різних способах передачі дозволяють порівняти ці способи передачі між собою та вказати, які з них у цьому відношенні є найбільш досконалими.
За відсутності перешкод кожному прийнятому сигналу хвідповідає цілком певний сигнал s. За наявності перешкод ця однозначна відповідність порушується. Перешкода, впливаючи на сигнал, що передається, вносить невизначеність щодо того, яке з можливих повідомлень було передано, і за прийнятим сигналом хтільки з деякою ймовірністю можна судити про те, що було передано той чи інший сигнал s. Ця невизначеність описується апостеріорнимрозподілом ймовірностей Р(s/х).
Якщо відомі статистичні властивості сигналу sта перешкоди w(t), то можна створити приймач, який виходячи з аналізу сигналу хбуде знаходити апостеріорний розподіл Р(s|х).Потім за видом цього розподілу приймається рішення, яке з можливих повідомлень було передано. Рішення приймається оператором чи самим приймачем за правилом, що визначається заданим критерієм.
Завдання полягає в тому, щоб відтворити повідомлення, що передається найкращим чином у сенсі обраного критерію. Такий приймач називається оптимальнима його перешкодостійкість буде максимальною при заданому способі передачі.
Незважаючи на випадковий характер сигналів х, Найчастіше є можливість виділити безліч найбільш можливих сигналів (x i), i=1,2...m,відповідних передачі деякого сигналу s i. Імовірність того, що переданий сигнал прийнято правильно, дорівнює Р(х i /s i),а ймовірність того, що його прийнято помилково, дорівнює 1- Р(х i | s i) = .Умовна ймовірність Р(х j | si)залежить від способу формування сигналу, від перешкод, що є в каналі, та від обраної вирішальної схеми приймача. Повна ймовірність помилкового прийому елемента сигналу, очевидно, дорівнюватиме:
P 0 = ![]()
де P(s i)- апріорні ймовірності переданих сигналів.
4. КРИТЕРІЇ ОПТИМАЛЬНОГО ПРИЙОМУ СИГНАЛІВ
Щоб визначити, яка з вирішальних схем є оптимальною, необхідно насамперед встановити, у сенсі розуміється оптимальність. Вибір критерію оптимальності не є універсальним, він залежить від поставленого завдання та умов роботи системи.
Нехай на вхід приймача надходить сума сигналу та перешкоди x(t) = sk(t)+w(t), де s k (t)- Сигнал, якому відповідає кодовий символ а k , w(t)- Адитивна перешкода з відомим законом розподілу. Сигнал s kу місці прийому є випадковим з апріорним розподілом P(s k).На підставі аналізу коливання х(t)приймач відтворює сигнал s i. За наявності перешкод це відтворення може бути абсолютно точним. За прийнятою реалізацією сигналу приймач обчислює апостеріорний розподіл Р(s i /х), що містить всі відомості, які можна отримати з прийнятої реалізації сигналу х(t).Тепер необхідно встановити критерій, за яким приймач видаватиме на основі апостеріорного розподілу P(s i /х)рішення щодо переданого сигналу s k.
При передачі дискретних повідомлень широко використовується критерій Котельникова ( критерій ідеального спостерігача). Відповідно до цього критерію приймається рішення, що переданий сигнал s i ,для якого апостеріорна ймовірність Р(s i /х)має найбільше
значення, тобто реєструється сигнал s iякщо виконуються нерівності
Р(s i/х) > Р(s j/х), j i. (1)
При використанні такого критерію є повна ймовірність помилкового рішення P 0буде мінімальною. Дійсно, якщо за сигналом хприймається рішення про те, що було передано сигнал s i ,то, очевидно, ймовірність правильного рішення буде рівна Р(s i /х),
а ймовірність помилки - 1 - P(s i/х).Звідси випливає, що максимум апостериорної ймовірності Р(s i /х)відповідає мінімум повної ймовірності помилки
P 0 = ![]()
де Р(s i)-апріорні ймовірності переданих сигналів.
На підставі формули Байєса
P(s i /x)= ![]() .
.
Тоді нерівність (1) можна записати в іншому вигляді
P(s i) р(х/s i .) >P(s j) р(х/s j)(2)
![]() . (3)
. (3)
Функцію р(х/с)часто називають функцією правдоподібності. Чим більше значення цієї функції при даній реалізації сигналу х,тим правдоподібніше, що передавався сигнал s. Відношення, що входить у нерівність (3),
називається ставленням правдоподібності. Користуючись цим поняттям, правило рішення (3), що відповідає критерію Котельникова, можна записати як
Якщо передані сигнали рівноймовірні P(s i) =Р(s j) = ,то це правило рішення приймає простіше
Отже, критерій ідеального спостерігача зводиться порівняння відносин правдоподібності (5). Цей критерій є загальнішим і називається критерієм максимальної правдоподібності.
Розглянемо бінарну систему, де передача повідомлень здійснюється з допомогою двох сигналів s 1 (t)і s 2 (t), що відповідають двом кодовим символам a 1і a 2. Рішення приймається за результатом обробки прийнятого коливання x(t)пороговим методом: реєструється s 1, якщо х<х 0 , і s 2, якщо х х 0, де х 0- Деякий пороговий рівень х. Тут можуть бути помилки двох видів: відтворюється s 1, коли передавався s 2, і s 2, коли передавався s 1. Умовні ймовірності цих помилок (імовірності переходів) будуть рівними:
 , (7)
, (7)
 (8)
(8)
Значення цих інтегралів може бути обчислені як відповідні площі, обмежені графіком щільностей умовного розподілу ймовірностей (Рис.2). Ймовірності помилок першого та другого виду відповідно:
P I = P (s 2) P (s 1 | s 2) = P 2 P 12,
P II = P (s 1) P (s 2 | s 1) = P 1 P 21 .
Повна ймовірність помилки при цьому
P 0 = P I + P II = P 2 P 12 + P 1 P 21.
 Нехай Р 1 = Р 2тоді
Нехай Р 1 = Р 2тоді
P 0 =.
 Неважко переконатися, що у цьому випадку мінімум Р 0має місце при P 12 = P 21, тобто при виборі порога відповідно до Рис.2. Для такого порога Р 0 = P 12 = Р 21. Рис.2. значення P 0визначається заштрихованою площею. За будь-якого іншого значення порога величина Р 0буде більше.
Неважко переконатися, що у цьому випадку мінімум Р 0має місце при P 12 = P 21, тобто при виборі порога відповідно до Рис.2. Для такого порога Р 0 = P 12 = Р 21. Рис.2. значення P 0визначається заштрихованою площею. За будь-якого іншого значення порога величина Р 0буде більше.
Незважаючи на природність та простоту, критерій Котельникова має недоліки. Перший полягає в тому, що для побудови вирішальної схеми, як це випливає із співвідношення (2), необхідно знати апріорні можливості передачі різних символів коду. Другим недоліком цього критерію є те, що всі помилки вважаються однаково небажаними (мають однакову вагу). У деяких випадках таке припущення не є правильним. Наприклад, при передачі чисел помилка в перших цифрах більш небезпечна, ніж помилка в останніх цифрах. Перепустка команди або помилкова тривога в різних системах оповіщення можуть мати різні наслідки.
Отже, у випадку при виборі критерію оптимального прийому необхідно враховувати ті втрати, які зазнає одержувач повідомлення за різних видів помилок. Ці втрати можна висловити деякими ваговими коефіцієнтами, що приписуються кожному з хибних рішень. Оптимальною вирішальною схемою буде така, що забезпечує мінімум середнього ризику. Критерій мінімального ризику належить до класу про байесових критеріїв.
У радіолокації широко використовують критерій Неймана-Пірсона. При виборі цього критерію враховується, по-перше, що помилкова тривога і пропуск мети є рівноцінними за своїми наслідками, і, по-друге, що невідома апріорна ймовірність переданого сигналу.
5. ОПТИМАЛЬНИЙ ПРИЙОМ ДИСКРЕТНИХ СИГНАЛІВ
Джерело дискретних повідомлень характеризується сукупністю можливих елементів повідомлення u 1 , u 2 ,..., u mймовірностями появи цих елементів на виході джерела Р(u 1), Р(u 2),..., Р(u m).У передавальному пристрої повідомлення перетворюється на сигнал таким чином, що кожному елементу повідомлення відповідає певний сигнал. Позначимо ці сигнали через s 1 , s 2 ..., s mа їх ймовірність появи на виході передавачів (апріорні ймовірності) відповідно через P(s 1), P(s 2),..., P(s m).Очевидно, апріорні ймовірності сигналів P(s i)рівні апріорним ймовірностям Р(u i)відповідних повідомлень P(s i) =Р(u i).У процесі передачі сигнал накладається перешкода. Нехай ця перешкода має рівномірний спектр потужності з інтенсивністю.
Тоді сигнал на вході можна як суму переданого сигналу s i (t)та перешкоди w(t):
х(1) =s i(t) + w(t) ,(i = 1, 2, ..., m).
У випадку, коли апріорні ймовірності сигналів однакові P(s 1)=Р(s 2)=...=P(s m) = ,критерій Котельникова набуває вигляду:
 (9)
(9)
Звідси випливає, що при рівноймовірних сигналах оптимальний приймач відтворює повідомлення, відповідне переданому сигналу, який має найменше середньоквадратичне відхилення від прийнятого сигналу.
Нерівність (9) можна записати в іншому вигляді, розкривши дужки:
Для сигналів, енергії яких однакові, це нерівність для всіх i jнабуває більш простої форми:
 . (10)
. (10)
І тут умова оптимального прийому можна сформулювати в такий спосіб. Якщо всі можливі сигнали рівноймовірні і мають однакову енергію, оптимальний приймач відтворює повідомлення, відповідне переданому сигналу, взаємна кореляція якого з прийнятим сигналом максимальна.
Отже, при Е 2 =Е 1 приймач Котельникова, реалізує умови роботи (10), є кореляційним (когерентним) (Рис.3).


Рис. 3. Кореляційний приймач Рис.4. Приймач із узгодженими фільтрами.
Оптимальний прийом можна також реалізувати у схемі з узгодженими лінійними фільтрами (Рис. 5), імпульсні реакції яких мають бути
g i =cs i (T - t), Де с - Постійний коефіцієнт.
Розглянуті схеми оптимальних приймачів відносяться до типу когерентних, у яких враховується як амплітуда, а й фаза високочастотного сигналу. Зауважимо, що у схемах оптимальних приймачів відсутні фільтри на вході, які у реальних приймачах завжди є. Це означає, що оптимальний приймач при флуктуаційних перешкод не вимагає фільтрації на вході. Його завадостійкість, як ми побачимо далі, не залежить від ширини смуги пропускання приймача.
6. ІМОВІРНІСТЬ ПОМИЛКИ ПРИ КОГЕРЕНТНОМ ПРИЙОМУ
ДВОЙКОВИХ СИГНАЛІВ
Визначимо ймовірність помилки у системі передачі двійкових сигналів прийому на оптимальний приймач. Ця ймовірність, очевидно, буде мінімально можливою і характеризуватиме потенційну, перешкодостійкість при даному способі передачі.
Якщо передані сигнали s 1і s 2рівноймовірні Р 1 = Р 2 = 0,5,то повна ймовірність помилки P 0при оптимальному прийомі бінарних сигналів s 1 (t) і s 2 (t) дорівнюватиме :
Р 0 = , (11)
де Ф()=- Інтеграл ймовірності,  .
.
З наведеної формули випливає, що ймовірність помилки Р 0, Що визначає потенційну завадостійкість, залежить від величини - відношення питомої енергії різниці сигналів до інтенсивності перешкоди N 0. Чим більше це ставлення, тим більша потенційна завадостійкість.
Таким чином, при рівноймовірних сигналах можливість помилки повністю визначається величиною . Значення цієї величини залежить від спектральної густини перешкод N 0та переданих сигналів s 1 (t)і s 2 (t).
Для систем з активною паузою, в яких сигнали мають однакову енергію ![]() , Вираз для 2 можна представити в наступному вигляді:
, Вираз для 2 можна представити в наступному вигляді:
![]() ,
,
де  - Коефіцієнт взаємної кореляції між сигналами, - Відношення енергії сигналу до питомої потужності перешкоди.
- Коефіцієнт взаємної кореляції між сигналами, - Відношення енергії сигналу до питомої потужності перешкоди.
Імовірність помилки для таких систем визначається формулою
P 0 = ![]() (12)
(12)
Звідси випливає, що за = - 1 , тобто. s 1 (t) = - s 2 (t), Система забезпечує найбільшу потенційну завадостійкість. Ця система із протилежними сигналами. Для неї = 2q0.Практичною реалізацією системи із протилежними сигналами є система з фазовою маніпуляцією.
Порівняння різних систем передачі дискретних повідомлень зручно проводити за параметром , що є наведеним відношенням сигналу до перешкоди на виході оптимального приймача при заданому способі передачі ![]() .
.
Загалом радіотелеграфний сигнал можна записати
s i (t) = А i (t) cos (), 0
Де параметри коливання А i , ,набувають певних значень залежно від виду маніпуляції.
Для амплітудної маніпуляції A 1 (t)=A 0 , A 2 =0 ,
![]() .
.
Для частотної маніпуляції A 1 (t) = A 2 (t) = A 0. При оптимальному виборі рознесення частот()2 , де k- ціле число і , отримуємо
Для фазової маніпуляції А1(t) =A2(t)=А0,
Порівняння отриманих формул показує, що з усіх систем передачі бінарних сигналів найбільшу потенційну стійкість до перешкод забезпечує система з фазовою маніпуляцією. Порівняно з ЧС вона дозволяє отримати дворазовий, а порівняно з АМ – чотириразовий виграш за потужністю.
У системах зв'язку сигнал зазвичай складається із послідовності простих сигналів. Так, у телеграфії кожній літері відповідає кодова комбінація, що складається з п'яти елементарних посилок. Можливі складніші комбінації. Якщо елементарні сигнали, що становлять кодову комбінацію, незалежні, то ймовірність помилкового прийому кодової комбінації визначається такою формулою:
Р ок = 1 - (1 - Р 0) n
де Р 0 - ймовірність помилки елементарного сигналу, n - число елементарних сигналів кодової комбінації (значність коду).
Слід зазначити, що ймовірність помилки у вище розглянутих випадках повністю визначається ставленням енергії сигналу до спектральної щільності перешкоди і не залежить від форми сигналу. У випадку, коли спектр перешкоди відрізняється від рівномірного, ймовірність помилки можна зменшити, змінюючи спектр сигналу, т. е. його форму.
КОНТРОЛЬНІ ПИТАННЯ
1. Яке призначення демодулятора у цифровій системі зв'язку? У чому його основна відмінність від демодулятора аналогової системи?
2. Що таке скалярне добуток сигналів? Як воно використовується у алгоритмі роботи демодулятора?
3. Чи можна в оптимальному демодуляторі застосовувати узгоджені фільтри?
4. Що таке "критерій ідеального спостерігача"?
5. Що таке "правило максимуму правдоподібності"?
6. Як вибирається поріг вирішального пристрою? Що буде, якщо його змінити?
7. Який алгоритм прийняття рішення до РУ?
8. Поясніть призначення кожного блоку демодулятора.
11. Алгоритм оптимального демодулятора та його функціональна схема для ЧС.
12. Поясніть різницю у перешкодостійкості систем зв'язку з різними видами модуляції.
13. Пояснити осцилограми, одержані у різних контрольних точках демодулятора (для одного з видів модуляції).
ЛІТЕРАТУРА
1. Зюко А.Г., Кловський Д.Д., Назаров М.В., Фінк Л.М. Теорія передачі сигналів. М: Радіо і зв'язок, 1986.
2. Зюко А.Г., Кловський Д.Д., Коржік В.І., Назаров М.В. Теорія електронного зв'язку. М: Радіо і зв'язок, 1998.
3. Баскаков С.І. Радіотехнічні ланцюги та сигнали. М: Вища школа, 1985.
4. Гоноровський І.С. Радіотехнічні ланцюги та сигнали. М: Радянське радіо,1977.
КОРОТКА ХАРАКТЕРИСТИКА ДОСЛІДЖУВАНИХ ЛАНЦЮГІВ І СИГНАЛІВ
У роботі використовується універсальний стенд зі змінним блоком "МОДУЛЯТОР – ДЕМОДУЛЯТОР", функціональна схема якого наведена на рис. 20.1.

Джерелом цифрового сигналу є КОДЕР-1, який видає періодичну послідовність п'яти символів. За допомогою тумблерів можна встановити будь-яку п'ятиелементну кодову комбінацію, яка індикується лінійкою із п'яти світлодіодних індикаторів з написом "ПЕРЕДАНО". У блоці МОДУЛЯТОР відбувається модуляція (маніпуляція) двійковими символами "високочастотних" коливань за амплітудою, частотою або фазою, залежно від положення перемикача "ВИД МОДУЛЯЦІЇ" - АМ, ЧС, ФМ або ОФМ. При "нульовому" положенні перемикача вихід модулятора з'єднаний з входом (модуляція відсутня).
КАНАЛ зв'язку є суматором сигналу з виходу модулятора і шуму, генератор якого (ГШ) розташований в блоці ДЖЕРЕЛА СИГНАЛІВ. Внутрішній генератор квазібілого шуму, що імітує шум каналу зв'язку, працює в тій же смузі частот, в якій розташовані спектри модульованих сигналів (1228 кГц).
ДЕМОДУЛЯТОР виконаний за когерентною схемою із двома гілками; комутація видів модуляції – загальна з модулятором. Тому еталонні сигнали s 0 і s 1 і граничні напруги в контрольних точках стенду змінюються автоматично при зміні виду модуляції.
Знаками (Х) на функціональній схемі позначені аналогові перемножувачі сигналів, виконані на спеціалізованих ІМС. Блоки інтеграторів виконані операційними підсилювачами. Електронні ключі (на схемі не показано) розряджають конденсатори інтеграторів перед початком кожного символу.
Суматори (å) призначені для введення порогових значень напруги, що залежать від енергії еталонних сигналів s 1 і s 0 .
Блок "РУ" - вирішальний пристрій - є компаратором, тобто пристрій, що порівнює напруги на виходах суматорів. Саме " рішення " , тобто. сигнал "0" або "1" подається на вихід демодулятора в момент перед закінченням кожного символу та зберігається до прийняття наступного "рішення". Моменти прийняття "рішення" та подальшого розряду конденсаторів в інтеграторах задаються спеціальною логічною схемою, що управляє електронними комутаторами.
Для демодуляції сигналів з ОФМ до схеми демодулятора ФМ додаються блоки (на схемі не показані), які порівнюють попереднє і подальше рішення демодулятора ФМ, що дозволяє зробити висновок про скачування фази (або його відсутності) в символі. За наявності такого стрибка на вихід демодулятора подається сигнал "1", інакше - "0". У змінному блоці передбачений тумблер, що перемикає початкову фазу (j) опорного коливання (0 або p) – тільки ФМ та ОФМ. Для нормальної роботи демодулятора перемикач повинен бути в нульовому положенні.
При амплітудній маніпуляції передбачена можливість ручної установки порога з метою вивчення його впливу на ймовірність помилки прийому символу. Оцінка ймовірності помилки провадиться в ПК шляхом підрахунку числа помилок за певний час аналізу. Самі сигнали помилки (у символі або «літері») формуються у спеціальному блоці стенду («КОНТРОЛЬ ПОМИЛОК»), розташованому нижче за блок ЦАП. Для візуального контролю помилок у стенді є світлодіодні індикатори.
Як вимірювальні прилади використовуються двоканальний осцилограф, вбудований вольтметр і ПК, що працює в режимі підрахунку помилок.
ДОМАШНЄ ЗАВДАННЯ
1. Вивчіть основні розділи теми з конспекту лекцій та літератури:
С. 159 174, 181 191; с. 165¸192.
ЛАБОРАТОРНЕ ЗАВДАННЯ
1. Спостерігайте осцилограми сигналів у різних точках схеми демодулятора за відсутності шуму в каналі.
2. Спостерігайте появу помилок у роботі демодулятора за наявності шуму в каналі. Оцініть ймовірність помилки для АМ та ЧС при фіксованому значенні відношення сигнал/шум.
3. Отримайте залежність від ймовірності помилок при АМ від порогової напруги.
МЕТОДИЧНІ ВКАЗІВКИ
1. Робота демодулятора за умов відсутності перешкод.
1.1. Зберіть схему вимірювань відповідно до рис.20.2.Тумблерами КОДЕРА - 1 наберіть будь-яку двійкову комбінацію з 5 елементів. Ручку регулятора “ПОРІГ АМ” встановити у крайнє ліве положення. При цьому регулятор вимкнено та поріг встановлюється автоматично при зміні виду модуляції. Тумблер фазування опорного коливання ДЕМОДУЛЯТОРА встановити у положення "0 0". З'єднати вихід генератора шуму (ГШ) у блоці ДЖЕРЕЛА СИГНАЛІВ з входом n(t) КАНАЛУ зв'язку. Потенціометр виходу генератора шуму – у крайньому лівому положенні (напруга шуму відсутня). Вхід зовнішньої синхронізації осцилографа з'єднати з гніздом C2 в блоці ДЖЕРЕЛА, а підсилювачі вертикального відхилення променів перевести в режим з відкритим входом (для пропускання постійних складових досліджуваних процесів).
1.2. Кнопкою перемикання видів модуляції встановити варіант "0", що відповідає сигналу на вході модулятора. Знявши осцилограму цього сигналу і, не змінюючи режим розгортки осцилографа, вибрати один із видів модуляції (АМ). Замалювати осцилограми в контрольних точках демодулятора:
· На вході демодулятора;
· На виходах перемножувачів (в одному масштабі по вертикальній осі);
· На виходах інтеграторів (також в одному масштабі);
· На виході демодулятора.
На всіх отриманих осцилограм відзначити положення осі часу (тобто положення нульового рівня сигналу). Для цього можна зафіксувати положення лінії розгортки при замиканні вхідних затискачів осцилографа.
1.3. Повторити п.1.2 іншого виду маніпуляції (ЧМ).
 |
2. Робота демодулятора за умов перешкод.
2.1. Перемикачем ВИГЛЯД МОДУЛЯЦІЇ встановити ФМ. Підключити один із входів двопроменевого осцилографа до входу модулятора, а другий - до виходу демодулятора. Отримайте нерухомі осцилограми цих сигналів.
2.2. Плавно збільшуючи рівень шуму (потенціометром ГШ) домогтися появи рідкісних збоїв на вихідний осцилограмі або на вхідному табло ПРИЙНЯТО.
2.3. За допомогою осцилографа виміряти встановлене відношення сигнал/шум. Для цього, послідовно відключаючи джерело шуму, виміряти на вході демодулятора розмах сигналу (у поділах на екрані) - 2а - (тобто подвійна амплітуда сигналу), а відключаючи джерело сигналу від входу каналу і відновивши шумовий сигнал - виміряти розмах шуму (також у розподілах) - 6s. Знайдене відношення а/s внести до таблиці 20.1.
2.4. Перемикачем «Вид модуляції» встановлювати послідовно АМ, ЧС, та ФМ, спостерігаючи за спалахами світлодіода "ПОМИЛКА" або по осцилограмі вихідного сигналу демодулятора частоту появи помилок. Результати спостережень унести до звіту.
2.5. Не змінюючи рівень шуму в каналі, виміряти можливість помилки демодулятора в прийомі символу за кінцевий час аналізу (тобто оцінку ймовірності помилки). Для цього привести ПК в режим вимірювання ймовірності помилки (див. ДОДАТОК) і встановити час аналізу 1030 с. Починаючи з ФМ (а потім – ЧС та АМ) визначити число помилок за час аналізу та оцінку ймовірності помилки. Отримані дані внести до табл. 20.1.
| |
3.1. Перемикачем ВИГЛЯД МОДУЛЯЦІЇ встановити АМ. Потенціометр виходу генератора шуму встановити щонайменше. За допомогою осцилографа, підключеного до виходу нижнього інтегратора, виміряти розмах пилкоподібної напруги по вертикалі у вольтах - U max .
3.2. Заготовити таблицю 20.2, передбачити у ній щонайменше 5 значень порога U пор.
Табл.20.2 Оцінка ймовірності помилки залежно від порога (АМ)
3.3. Потенціометром «ПОРІГ АМ» встановити значення порога U max /2 (вимірюючи напругу «Е 1 /2» у контрольній точці демодулятора за допомогою вольтметра постійної напруги). Збільшити рівень шуму каналі до появи рідкісних збоїв. Не змінюючи рівень шуму, виміряти оцінку ймовірності помилки для цього порога (U max /2), а потім і для решти значень U пор. Побудувати графік залежності Р ош = j (U пор).
Звіт має містити:
1. Функціональну схему вимірів.
2. Осцилограми, таблиці та графіки за всіма пунктами вимірювань.
3. Висновки за пунктами 2.4 та 3.3.
Демодулятори ЧС сигналів можуть бути реалізовані як на цифрових, так і на аналогових пристроях. Один з варіантів аналогового демодулятора використовує представлення ЧС сигналу як суми двох АМ сигналів. Така схема одержала назву двосмугової схеми прийому по обгинальній (рис. 2.6).
Рис. 14.6 - Демодулятор ЧС сигналу з огинаючої
У верхньому тракті демодулятора виділяється огинаюча сигналу з частотою, у нижньому - з частотою. При проходженні через смугові фільтри ПФ1, ПФ2 ЧС сигнал набуває ознак амплітудної модуляції. У кожному тракті є амплітудні демодулятори (детектори) Д1 та Д2 та фільтри нижніх частот ФНЧ1, ФНЧ2. Сигнали трактів підсумовуються з різним знаком у суміжному пристрої. Пороговий пристрій ПУ забезпечує отримання безпаузного сигналу з добрими параметрами (амплітуда імпульсів, тривалість фронтів). Тимчасові діаграми частотного демодулятора прийому по огинаючої наведені на рис. 2.7.
У цифрових частотних демодуляторах реалізується принцип класифікації сигналів, що приймаються по частоті на основі вимірювання тривалості напівперіоду (або періоду) прийнятого сигналу. На підставі вимірювання тривалості напівперіоду при двійковій модуляції вирішальний пристрій ототожнює прийнятий напівперіод з одним із значень полярності сигналу. Таким чином, реальний ЧС сигнал розбивається на елементарні відрізки сигналу, що містять напівперіод несучого коливання. Визначення меж одиничних елементів здійснюється з точністю, що не перевищує тривалість одного елементарного відрізка сигналу. Різновидом методу вимірювання тривалості напівперіоду (періоду) сигналу, що приймається, є метод вимірювання різниці набігу фази кожного поточного коливання щодо попереднього періоду. Структурна схема цифрового частотного демодулятора наведено на рис. 2.8. Тимчасові діаграми, що пояснюють принцип дії цифрового демодулятора, наведені на рис. 2.9.

Рис. 14.7 - Тимчасові діаграми частотного демодулятора при прийомі по обгинальній

Рис. 14.8 – Структурна схема цифрового частотного демодулятора

Рис. 14.9 - Тимчасові діаграми цифрового частотного демодулятора:
а- Вхідний сигнал, що відповідає частоті; б- те саме, після обмежувача; в, г- імпульси скидання, д, е- Імпульси на виході дільників; ж- Імпульси на виході ФД
Вхідний сигнал перетворюється підсилювачем-обмежувачем УО на прямокутні імпульси (рис. 2.9, б).
У формувачі імпульсів скидання ФІС виділяються короткі імпульси, що відповідають кожному періоду вхідного сигналу імпульсів, зображених на рис. 2.9, б. Короткі імпульси подаються по черзі на дільники частоти (рис. 2.9, ві г), встановлюючи їх у початковий стан (позначено точками на рис. 2.9, ді е). Імпульси на виході дільників прийому середньої частоти f cpзображені на рис. 2.9, ді е. У цьому випадку між сигналами на виході дільників зсув фази дорівнює чверті періоду, причому знак зсуву фаз змінюється після надходження кожного імпульсу скидання. Сигнали з виходів дільників надходять на вхід фазового детектора ФД (виконаного у вигляді суматора mod2), на виході якого виникає послідовність імпульсів (рис. 2.9, ж), ширина кожного з яких залежить від співвідношення фаз сигналів на виходах дільників.
При появі на вході демодулятора частоти послідовність імпульсів стає ширшою, а при появі на вході демодулятора частоти - вже.
СОЮЗ СОВЕТСНИХ.СОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 483592 3 Л ПИСАНИЕ ИЗОБРЕТЕНИЯ ИДЕТЕЛЬСТВУ К АВТОРСКОМ ститут А сГОСУДАРСТВЕННЫЙ НОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯПРИ ГКНТ СССР(57) Изобретение относится к радиотехнике, Цель изобретения - повышение помехоустойчивости и уменьшениеуровня нелинейных искажений, Для достижения цели в демодулятор введеныдетектор 7 экстремальных отсчетов,блок 8 вибірки-зберігання, алгебраїчний суматор 9, інвертор 10, коригуючий фільтр 11, частот 1 Це обумовлює високу лінійність дискримінаційної х-ки демодулятора і як наслідок значного зниження рівня нелінійних спотворень. Підвищення завадостійкості обумовлено, тим, що з появі та збільшенні початкової частотної розлади не відбувається збільшення петльового посилення та еквівалентної шумової смуги, що зазвичай призводить до погіршення фільтруючих властивостей. 1 іл, Винахід відноситься до радіотехніки і може бути використане для прийому частотно-модульованих (ЧМ) сигналів 5 Мета винаходу - підвищення перешкод стійкості і зменшення рівня нелінійних спотворень. На кресленні представлена Функціональна електрична схема предл га Оемого демодулятора ЧМ-сигнал перший Фільтрнижніх частот (ФНЧ) 2, другий перемножувач 3, другий фНЧ 4, генератор, що перебудовується 5, Аазовращатель 6на 90 О, детектор 7 екстремальних відліків, блок 8 вибірки-зберігання,алгебраїчний суматор 9, інтегратор 10, коригуючий Филь 12, додатковий ФНЧ 13 і джерело 14 опорної напруги,Демодулятор ЧС-сигналів працює,наступним чином. 25В перемножувачах 1 і 3 і ФНЧ 2і 4 здійснюється виділення квадратурних складових вхідного сигналу на різницевій частоті: Ди = ів ю де ы, - миттєве значення частоти вхідного сигналу; ю- частота коливання перебудовуваного генератора нульового рівня з позитивною похідною вихідним сигналом другого ФНЧ4 і Формує короткочасні імпульси, відповідні за тимчасовим положенням екстремальним відлікам вихідного сигналу додаткового ФНЧ 13. Підсилювач-обмежувач 12стабілізує амплітуду сигналу з ви 50ходу першого ФНЧ 2. Внаслідок цього амплітуда сигналу на виході додаткового ФНЧ 13 визначається тільки співвідношенням та його частоти зрізу, яка вибирається істотно менше частот зрізу першого 2 і другого 4ФНЧ. У блоці 8 вибірки - зберігання здійснюється синхронне детектування амплітуди вихідного сигналу додаткового ФНЧ 13. Напруга на виході джерела 14 опорної напруги дорівнює повний 1.не величини рівня обмеження всі;". відхилення величини ам від значення ам)вибраного на схилі амплітудно-частотної характеристики додаткового ФНЧ 13. За рахунок утвореної через інтегратор 10 петлі автоматичного регулювання частота генератора, що перебудовується 5 відстежує зміна частоти вхідного сигналу зі зміщенням Лм тобто, м,. , Напруга на виході інтегратора 10 через коригуючий Фільтр11 надходить на вихід демодулятора,У запропонованому демодуляторі забезпечується робота на невеликій ділянці амплітудно-частотної характеристики додаткового ФНЧ 13 при значних девіаціях частоти вхідного сигналу. дискримінаційної характеристики демодулятора і, як наслідок, значне снюкування рівня нелінійних спотворень. Астатичні властивості демодулятора забезпечуються застосуванням як блок 10 саме інтегратора, а не ФНЧ (відмінність виявляється, наприклад, при замирання сигналу або короткочасних його зникненнях). Велика крутизна скатів амплітудно-частотних характеристик першого і другого ФНЧ 2 і 4 забезпечує збереження високої завадостійкості пропонованого демодулятора при появі на його вході перешкод від сусідніх каналів прийому, Підвищення завадостійкості в порівнянні з відомим демодулятором обумовлено тим, що частотного розладу не відбувається збільшення петльового посилення і еквівалентної шумової смуги, що зазвичай призводить до погіршення фільтруючих властивостей, Формула винаходу Педагог Замовлення 2849/53 Тираж 884 ПередплатнеВНИИПИ Державного комитета.по винаходам і відкриттям при ГЕНТ СРСР 113035, Москва, Ж, Рауська наб д. 4/5 Виробничо-видавничий комбінат "Патент", м. Ужгород, вул. Гагаріна,70 об'єднані другий перемножувач і другий фільтр нижніх частот, послідовно з'єднані перебудовується генератор і фазообертач другим входом другого перемножувача, який відрізняється тим, що, з метою підвищення перешкодостійкості і зменшення рівня нелінійних спотворень, введені послідовно з'єднані детектор екстремальних, відліків, блок вибірки-зберігання, алгебраїчний суматор, інтегратори коригувальний фільтр, послідовно з'єднані , а також джерело опорної напруги, при цьому вхід підсилювача-обмежувача з'єднаний з виходом першого фільтра нижніх частот, вхід детектора екстремальних відліків з'єднаний з виходом другого фільтра нижніх частот, вихід додаткового фільтра нижніх частот з інформаційним входом блоку вибірки- зберігання, вихід джерела опорної напруги підключений до віднімає входу алгебраїчного суматора, а вихід інтегратора - до керуючого входу генератора, що перебудовується, при цьому вихід коригувального фільтра є виходом демодулятора 20 ЧМ-сигналів
Заявка
4265266, 18.06.1987
МОСКІВСЬКИЙ АВІАЦІЙНИЙ ІНСТИТУТ ІМ. СЕРГО ОРДЖОНІКИДЗЕ
МАРТИРОСОВ ВОЛОДИМИР ЕРВАНДОВИЧ
МПК / Мітки
Код посилання
Демодулятор чм-сигналів
Схожі патенти
15. Протягом одного періоду модулірующей частоти підрахунок числа імпульсів в пачці і, відповідно, опитування лічильника імпульсів 9 проводиться багаторазово, Це досягається з вибором різницевої частоти. Таким чином у міру зміни частоти ЧС сигналу відбувається зміна амплітулти сигналу на виході пристрою двійкового ЧС демодулятора, Резульлічильника поділу йорцой частоти з'єднаний здругими входами першої і другої схем совпа.деция. Одиничний вихід тригера пачки підключений через другий генератор одиночного цм.пульса до входу установки в нуль лічильника ім. 5пульсів, а нульовий вихід тригера пачки з'єднаний з входом накопичувального регістру і з другими входами третьої і четвертої схем збігу, виходи яких підкачені до еді"нічного...
16 з'являється сигнал одиничного рівня, якийрез призводить до відключення одного перевагу разівника з групи працюючих перетворювачів зняттям імпульсів упкий 20 рівняння з входу випрямляча 1, переводячи його в стан готовності коперативному включенню, при цьомуконденсатор фільтра 2 зазначеного блоку залишається зарядженим. Одночасно25 відключається ще один перетворювач, що знаходився до цього в стані готовності до включення, за допомогою розмикання силових ключів 5 і 6, тут. 40, в 0 - величини, що розширюють діаЗО пазон, що характеризується постійністю структури силової схеми статичних перетворювачів. Вони задаються напругою зміщення Ц поданим напрямий вхід першого компаратора 15ав- і інверсний вхід другого...
Протягом часу перемикання, яке завжди є кінцевою величиною, вимір практично неможливий, тому що з'являється невизначеність режиму роботи блоку поділу. Мета винаходу - підвищення точності вимірювання частоти. Мета досягається тим, що пристрій для вимірювання частоти амплітуди гармонійного сигналу, що містить три поснедовательно.сполучених з входом пристрою блоку диференціювання і послідовно з'єднані перші блок поділу і. блок вилучення квадратного кореня, введені послідовно з'єднані перший блок множення, перший. блок віднімання, другий блок поділу і другий. блок вилучення квадратного кореня, вихід якого є виходом вимірюваної амплітуди,...
Частотний детектор є одним з важливих вузлом будь-якого УКХ ЧС приймача, оскільки від його якості залежить якість звукового сигналу на виході приймача. Людське вухо не приймає ВЧ модульований сигнал, а приймає лише НЧ амплітудно модульований. Для того, щоб перетворити чатотну модуляцію в амплітудну, і потрібен ЧМ детектор. Частотно модульований сигнал виглядає так:
Оскільки широко розповсюджені дробові детектори і дискримінатори на основі ВЧ трансформаторів мають досить не просте налаштування і досить скрутне (особливо без досвіду) виготовлення, я спробував зробити кілька варіантів ЧМ детекторів без котушок, трансформаторів і контурів.
На схемі наведено класичний підсилювач на пентоді, давайте докладніше розглянемо роботу вище наведеного ЧС детектора: Посилений синал ПЧ через конденсатор С3 подається на керуючу сітку лампи, але на його шляху (сигналу) стоїть ланцюжок Z1R2, її призначення полягає в тому, щоб задати зміщення на сітці по потоянному струму і одночасно зменшити добротність кварцового резонатора(Не плутати з п'єзокерамічним дискримінатором). Оскільки кварцовий резонатор спочатку виготовлений певну частоту, його смуга перебудови досить вузька і менше смуги модуляції у кілька разів. Щоб розширити смугу резонатор зашунтований резистором. Якщо цього не робити, тоді резонатор на деяких ділянках ЧС сигналу буде подати в смугу модуляції, а на деяких немає, тому, АМ сигнал на виході детектора буде сильно схильний. При зменшеній добротності смуга перебудови резонатора зростає, але все одно за рахунок механічного резонансу, мінімальний динамічний опір кварцевої пластини і максимальна амплітуда коливань буде в смузі частот, на яку налаштований резонатор механічно. Оскільки частотна модуляція змінює частоту синалу то вище, то нижче за частотою, ніж механічний резонанс, динамічний опір по змінному струму пластини, змінюється пропорційно частоті сигналу, тим самим перетворюючи ЧС на АМ. Ця схема добре працює з лампами 6ж1п, 6ф1п, 6ж9п.
А ось ця схема зібрана "в залозі":
У цій схемі закладено принцип "незбудженого резонатора". Це теж схема підсилювача на пентоді, але тут кварцовий резонатор стоїть у зворотному зв'язку, який регулюється резистором R4. Вся ідея в тому, щоб довести посилення до такого стану, щоб детектор ЧС був на межі генерації. Справа в тому, що кварцовий резонатор має як паралельний, так і послідовний резонанс. Тут використовується послідовний. Залежно від відхилення частоти від точки резонансу, прохідна ємність резонатора (за рахунок динамічного опору) теж змінюється пропорційно до ЧС сигналу, і тим самим перетворюючи змінний струм з ЧС в АМ. У цій схемі резонатор можна замінити конденсатором, і приймати ЧС сигнал на схилі АЧХ (трохи осторонь центру сигналу ПЧ) але якість сигналу та його амплітуда будуть набагато нижчими. Коли зворотний зв'язок встановлений на межі генерації детектора, лампа максимально посилюватиме амплітудні коливання змінного струму, виділені резонатором. Якщо довести детектор до генерації, тоді на виході буде чутно сильне тло (продетектовані коливання генератора) і при налаштуванні на радіостанцію буде чутно писк, оскільки кварц працює на своїй частоті і збігаючись з несучою радіостанцією (сигнал ПЧ) буде чути різницеві коливання.
А ось і цей макет:
Схема добре працює з лампами 6ж2п, 6к13п.
А ось і третя схема:
На закінчення хочу сказати, всі три схеми справляються зі своїми "зобов'язаннями", але ЧС детектор за першою схемою, має рівень вихідного сигналу вище, оскільки схема добре працює з пентодами у яких коротка характеристика (плавно змінювати посилення не вийде), а також доведеться підібрати резистор R2 під конкретний застосований резонатор. Друга схема порадувала більш м'яким підходом до точки генерації та "захопленням" точки детектування. Третя схема - це щось середнє між першою і другою схемами, оскільки має велике посилення в порівнянні з другою схемою і більшу гнучкість налаштування в порівнянні з першою.
Вдалих експериментів!
Артем (UA3IRG)
 Як перевірити змінний резистор мультиметром?
Як перевірити змінний резистор мультиметром?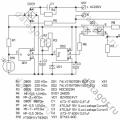 Що таке таймери для санвузла і як зробити вентилятор з таймером своїми руками?
Що таке таймери для санвузла і як зробити вентилятор з таймером своїми руками?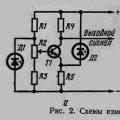 Перевірка реле напруги
Перевірка реле напруги